ATMS Monitoring — Vehicle Detection
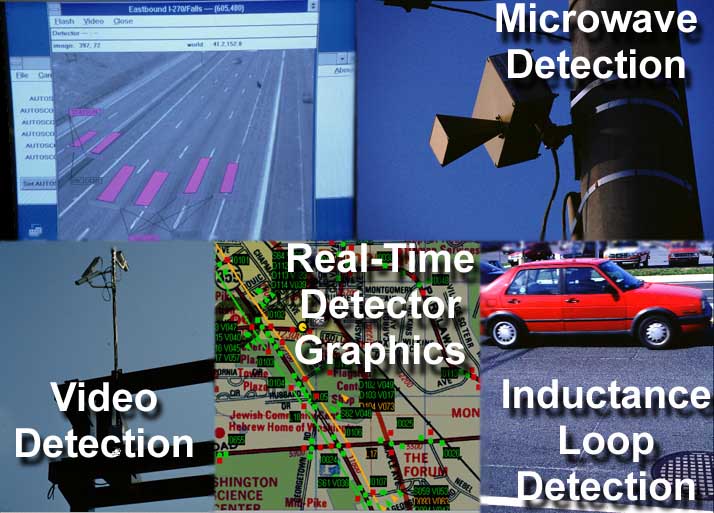
The Advanced Transportation Management System (ATMS) presently uses traditional inductive loop detectors for electronic traffic data collection. It currently has about 1,000 sampling loop detectors and can support a maximum of 3,000 detectors. These detectors collect lane occupancy, volume and speed data every minute. The raw data is averaged over a 5-minute period back at the Transportation Management Center (TMC). In addition to the sampling loop detectors at signalized intersections, 10,000 vehicle presence loop detectors are also installed at approach lanes of minor streets and left turns for signal actuation.
Radar and sonic detectors are being tested. Machine vision technology, (Autoscope and Trafficon currently being tested) which performs visual image processing for vehicular detection, is also being considered for further system expansion. The ATMS features a SQL relational database that is designed to accept data from a variety of types of detectors.
BENEFITS:
- Detection system provides for real-time monitoring, control and information
- Easily obtainable traffic data on vehicle classification and speed
- Provides a basis for automated incident detection
- Machine vision technology is non-intrusive and can easily be adjusted, relocated, or repositioned
- Machine vision offers significantly broader coverage area than the loop detectors extending beyond a single intersection
- The ATMS open architecture and relational database accommodates multiple types of detector technologies.
- Provides traffic data to be used for planning purposes